


Listen to this Museletter
Introduction
Advanced economies are entering an era defined by execution capacity.
Across aerospace, defence, healthcare, and energy, required physical output is rising in scale, precision, and continuity. Demographic contraction, tighter tolerances, and 99.99 per cent uptime requirements elevate the threshold for reliable production.
Robotics now carries that threshold.
As machines assume primary responsibility for precision, endurance, and safety-critical operations, physical work transitions from a biological system to an engineered one. Production becomes continuous. Error distributions become measurable. Performance becomes infrastructure.
Once robotic systems underpin the physical economy, advantage accrues upstream — to the semiconductors, materials, minerals, and energy systems that determine whether robotic work can exist at scale.
Robotics therefore represents a structural shift in industrial organisation.
What follows examines how that shift is reshaping power, supply chains, and capital allocation at a system level.
Agna Insights
1. Robotics Has Become the Physical Economy
The defining economic constraint of advanced economies is no longer demand. It is execution. Across aerospace, defence, healthcare, and energy, the volume, precision, and continuity of physical work required now exceed what human labour systems can reliably supply.
Demographic data makes this constraint explicit. Across the OECD, the working-age population has entered a structural decline. By 2035, more than two thirds of advanced economies will have fewer people aged 20 to 64 than they did in 2020. In manufacturing-intensive regions such as Germany, Japan, South Korea, and parts of the United States, the contraction of skilled technical labour is sharper than aggregate population figures suggest. Replacement rates for machinists, toolmakers, and maintenance engineers remain below one in most industrial categories.
At the same time, physical production requirements are rising rather than falling. Aerospace build rates are increasing to clear multi-year order backlogs. Defence procurement volumes are expanding due to geopolitical instability. Healthcare systems are scaling pharmaceutical and medical device manufacturing to meet the ageing population demand. Energy systems are being rebuilt around electrification, grid hardening, and low-carbon generation. These are capital-intensive, safety-critical, and continuous operations.
Human labour struggles under this combination of scale and constraint. Fatigue, variability, error rates, and safety exposure introduce limits that are no longer acceptable in many environments. In sectors where tolerances are measured in microns, contamination thresholds approach zero, or uptime expectations exceed 99.99 per cent, human-centred execution becomes a bottleneck rather than a solution.
Robotics resolves this bottleneck by converting physical work into an engineered system rather than a biological one.
This shift is not about replacing individual workers. It is about replacing labour as the primary organising unit of physical production. Once robots become responsible for the majority of repetitive, precise, or hazardous tasks, the structure of the physical economy changes.
Robotic systems operate continuously. They do not fatigue. Their error distributions are predictable. Their performance degrades in measurable ways rather than unpredictably. These properties matter more than headline productivity metrics when systems become large, interconnected, and safety-critical.
This is why robotics adoption is accelerating most rapidly in environments where failure is expensive rather than where wages are high. Semiconductor fabs, pharmaceutical plants, automotive and aircraft assembly lines, nuclear facilities, and defence logistics hubs are leading indicators. Labour cost is secondary. Reliability is primary.
As robotics becomes embedded across these systems, it takes on the characteristics of infrastructure. It becomes capital-intensive, long-lived, and tightly coupled to upstream supply chains. Deployment decisions are made years in advance. Design choices lock in dependencies for decades. Failure cascades across sectors rather than remaining local.
At this point, robotics stops behaving like equipment and starts behaving like an operating system for the physical world.
Once the physical economy runs on robots, the locus of power shifts. The decisive advantage is no longer access to labour or even capital. It is access to the components, materials, and energy systems that allow robotic work to be executed at scale and sustained over time.
This is the transition that defines the current moment. Robotics is no longer a productivity enhancer layered onto the economy. It is becoming the mechanism through which the economy functions.
Everything that follows in this paper builds from that premise.
2. Robotics Forces a New Industrial Stack
Robotics does not sit cleanly inside existing industrial categories because it collapses boundaries that were previously separable. In earlier industrial systems, computation, materials, energy, and mechanical force could be optimised independently. Robotics removes that separation.
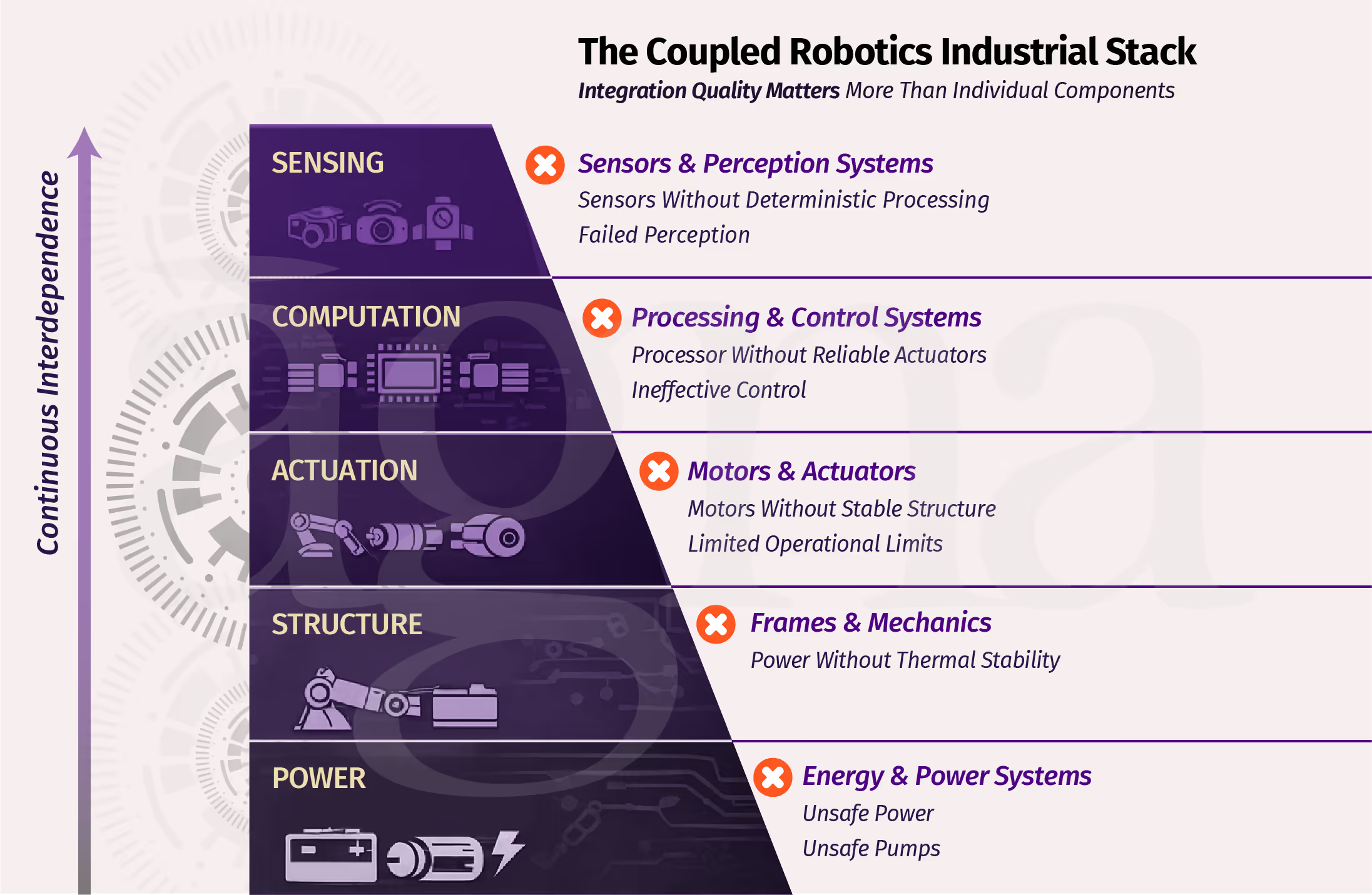
A robot is a closed-loop physical system. Sensing, computation, actuation, structure, and power are continuously coupled. Performance in one layer is meaningless without compatibility in the others. This coupling is what forces a new industrial stack.
In traditional manufacturing, materials selection was driven primarily by cost, machinability, and strength. In robotics, materials must satisfy multiple simultaneous constraints. They must be lightweight to reduce energy consumption. They must resist fatigue across billions of cycles. They must fail predictably to ensure human safety. They must tolerate thermal gradients generated by compact actuators and power electronics. These requirements narrow viable material choices sharply and increase dependence on specialised alloys, engineered polymers, and composites.
Computation follows a similar pattern. Robotics does not benefit primarily from peak compute performance. It requires determinism, low latency, and fault tolerance under continuous operation. This favours specialised semiconductors rather than general-purpose processors. Real-time control chips, power management ICs, and sensor fusion processors become critical. These components are produced in lower volumes, on older or specialised fabrication nodes, with longer qualification cycles. They sit uneasily within a semiconductor industry optimised for consumer scale and rapid turnover.
Energy systems complete the loop. Mobile and field-deployed robots require high-energy-density storage, rapid discharge capability, and stable thermal behaviour. Fixed robots require power electronics that can manage continuous high-load operation with minimal loss. Battery chemistry, motor design, and power semiconductor selection are therefore co-dependent decisions. A gain in one area often introduces constraints in another.
This interdependence changes how value is created. In robotics, integration quality matters more than individual component excellence. A superior sensor is useless if the processor cannot ingest data deterministically. A high torque motor is limited by thermal dissipation and material fatigue. A lightweight structure is constrained by vibration modes and control stability.
As robotics scales, this coupling pulls upstream supply chains into alignment. Semiconductor design must consider mechanical response times. Materials science must consider control dynamics. Mineral supply must consider motor topology and battery chemistry. The stack becomes vertically sensitive in a way that traditional industrial systems were not.
This is why robotics cannot be analysed as a downstream application of AI or automation. It reorganises industrial relationships upstream. Suppliers that previously served unrelated markets become linked by system requirements. Shortages propagate across layers rather than remaining isolated.
The effect is already visible. Even as AI and robotics demand accelerates, hardware bottlenecks persist. Power semiconductor and advanced packaging constraints continue to limit system-level deployments, while rare earth processing remains over 90% concentrated in China, restricting motor production despite available assembly capacity. In parallel, material qualification and supply diversification cycles can extend critical technology timelines by 12 to 24 months, delaying deployment regardless of software readiness.
The industrial implication is structural. Robotics creates a new class of strategic integration points where materials, chips, and energy converge. Control over these points determines system performance, scalability, and resilience.
This is the stack that matters. Not software on top of hardware, but a physically integrated system whose weakest layer defines the ceiling.
Once this stack is in place, robotics ceases to be modular. It becomes path dependent. Early choices in materials, semiconductors, and energy systems lock in capabilities and vulnerabilities for decades.
That is why robotics is not just another industry layered onto the economy. It is a forcing function that reshapes the industrial base itself.
3. The Physical Bottleneck:
Why Software Is No Longer the Binding Constraint
For most of the last decade, robotics progress was framed primarily as a software problem. Perception accuracy, autonomy, and planning were treated as the principal barriers to deployment. That framing reflected the state of the field at the time. It no longer does.
In structured and semi-structured environments, core robotic software capabilities have reached functional adequacy. Industrial vision systems routinely achieve object recognition accuracy above 98 per cent under controlled lighting. Motion planning algorithms operate within sub-millisecond latency budgets on embedded processors. Closed-loop control systems maintain stability across operating envelopes wider than those required in most industrial settings.
The marginal returns to further software improvement have diminished.
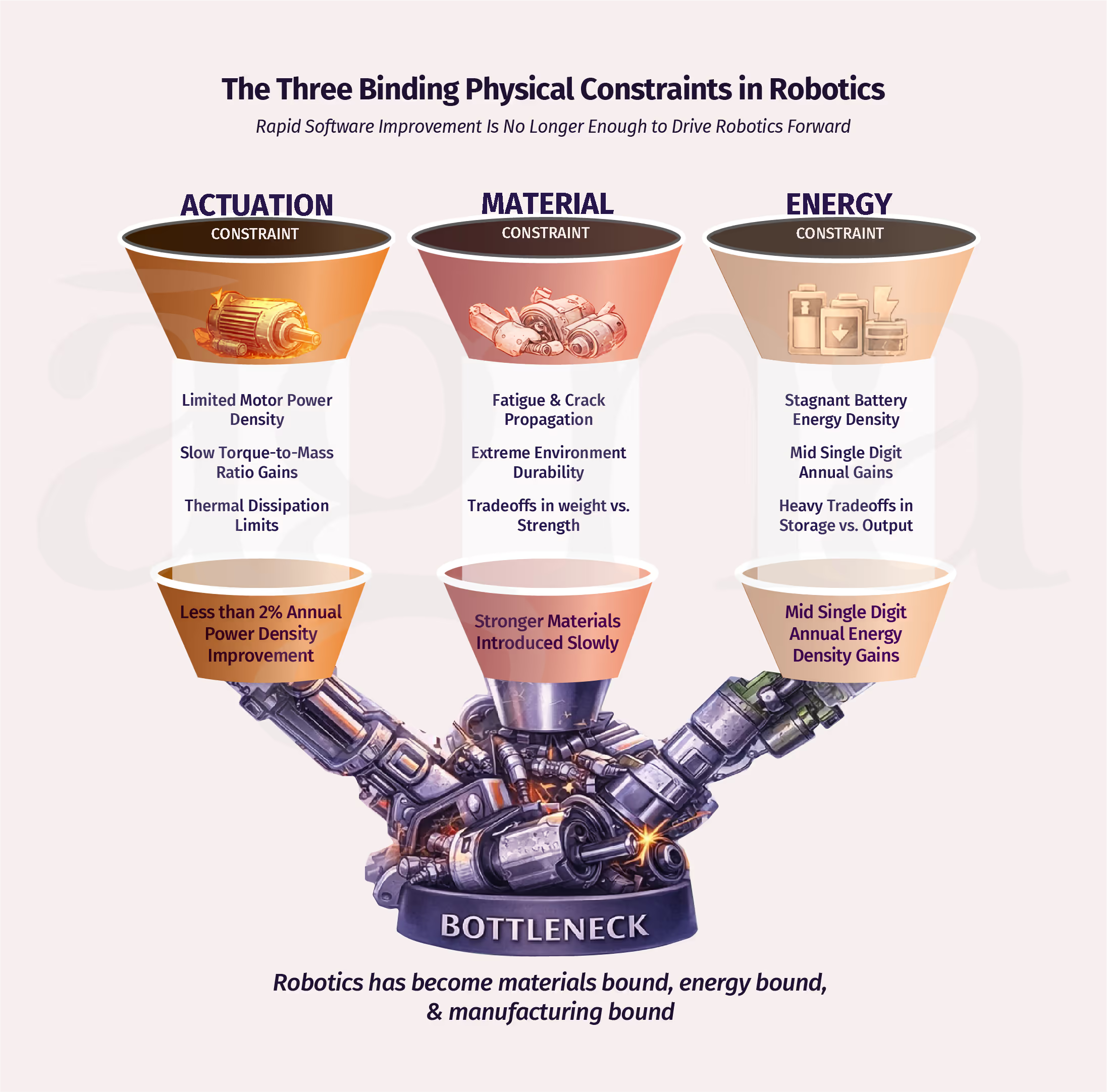
By contrast, the physical limits of robotic systems have become binding. The first constraint is actuation. Improvements in electric motor power density have slowed markedly. Over the past decade, torque-to-mass ratios have increased by less than 2 per cent annually across commercially viable actuators. Thermal dissipation, not control precision, now caps continuous operation. This directly constrains payload capacity, endurance, and deployment into high-force applications.
The second constraint is structural material performance. As robots move out of fixed factory cells into dynamic, human adjacent, or extreme environments, material failure becomes unacceptable. Fatigue life, crack propagation behaviour, and impact tolerance dominate design decisions. Lightweight composites introduce brittleness trade-offs. High-strength metals increase mass and energy demand. These constraints are rooted in materials physics rather than software optimisation.
Energy storage forms the third constraint. Battery-specific energy has improved steadily over decades, but annual improvement rates have flattened to the mid single digits. This is insufficient for many mobile, aerial, and field robotics applications that require long-duration autonomy. Energy density limitations force design compromises that software cannot overcome.
Semiconductor reliability compounds these issues. Robotics demands deterministic performance over long lifecycles, often exceeding fifteen years. This favours mature process nodes, hardened designs, and long-term supply commitments. The semiconductor industry, optimised for consumer electronics and rapid product cycles, has underinvested in these categories. As a result, robotics deployments are delayed not by insufficient algorithms but by unavailable or unqualified components.
The empirical signal is clear. Robotics software capability continues to advance rapidly, yet deployment curves in defence, healthcare, energy, and aerospace remain gated by physical system readiness. Software is no longer the rate-limiting step.
Robotics has therefore become materials-bound, energy-bound, and manufacturing-bound.
4. Chips, Materials, and Minerals as Capability Determinants
As robotics becomes infrastructure, capability is determined upstream rather than at the point of integration. Chips, materials, and minerals now define the ceiling of what robotic systems can do and how widely they can be deployed.
Semiconductors determine reaction time, fault tolerance, and operational safety. In robotics, latency variance matters more than peak throughput. A surgical or defence robot cannot tolerate unpredictable response behaviour. This drives demand for real-time processors, power electronics, and sensor interfaces designed for deterministic performance. Yet the majority of semiconductor capital expenditure remains focused on high-volume consumer and data centre workloads. This structural mismatch has produced chronic shortages of robotics-relevant components despite overall industry growth.
Materials determine the mechanical envelope and lifecycle economics. High-duty-cycle robots require materials capable of surviving billions of stress cycles without catastrophic failure. Collaborative robots require controlled compliance to ensure human safety. Extreme environment robots require resistance to radiation, corrosion, and thermal gradients far beyond conventional industrial specifications. These requirements dramatically narrow viable material choices and increase dependence on advanced alloys, engineered polymers, and specialised composites.

Critical minerals determine scale. Permanent magnet motors depend on rare earth elements such as neodymium, praseodymium, and dysprosium. Battery systems depend on lithium, nickel, cobalt, and graphite. Power semiconductors depend on silicon carbide and gallium nitride substrates. Processing and refining capacity for many of these materials remains highly concentrated geographically, even when raw extraction is more distributed.
This concentration introduces hard limits. Motor production can stall despite available assembly capacity. Battery manufacturing can be throttled by refining bottlenecks rather than demand. Power electronics output can be constrained by substrate availability rather than design capability.
These constraints tighten as robotics moves into safety-critical sectors. A medical robot cannot accept material substitution risk. A military platform cannot rely on adversarial supply chains for semiconductors or magnets. A nuclear maintenance robot cannot depend on components with uncertain provenance or lifecycle support.
At this point, commercial inputs become strategic assets.
Control over chips, materials, and minerals translates directly into control over robotic capability. Firms and states that secure reliable access to these inputs define their feasible operating envelope. Those that do not face ceilings that capital and software cannot break through.
Robotics does not degrade gracefully when these constraints bind. It simply fails to scale.
5. Robotics as a Geopolitical System
Once robotics becomes embedded in critical infrastructure, it ceases to be a commercial technology and becomes a strategic infrastructure layer. States do not treat strategic systems as neutral markets. They treat them as sources of leverage, vulnerability, and control.
This transition is already visible in the operationalisation of autonomous systems across aerial, terrestrial, and maritime domains. Uncrewed platforms are no longer assessed solely on performance metrics such as endurance, payload, or autonomy. Procurement and deployment decisions increasingly incorporate component provenance, sustainment independence, and resilience of upstream supply chains, reflecting recognition that autonomy without supply assurance introduces strategic fragility.
This shift is evident in how governments engage with robotics more broadly. Defence procurement no longer focuses on individual platforms alone. It increasingly specifies supply chain provenance, lifecycle assurance, and component sovereignty. A robotic system that performs well but relies on contested semiconductor supply or foreign-controlled mineral processing introduces unacceptable risk, regardless of unit cost.
The same logic now applies beyond defence. Healthcare systems depend on robotic manufacturing for pharmaceuticals, medical devices, and sterile consumables. Energy systems depend on robotic inspection, deployment, and maintenance to meet uptime and safety requirements. Space systems depend on robotic assembly and servicing because human presence is logistically prohibitive. Further, in orbital and deep space environments, where repair and substitution are impractical, access to radiation tolerant electronics, qualified materials, and trusted manufacturing ecosystems becomes mission critical rather than operationally advantageous.
When failure or disruption in these systems carries national level consequences, upstream dependencies become political concerns.
Industrial policy responses reflect this reality. Governments are shifting attention from finished robotic platforms toward the enabling layers that determine long term capability. Semiconductor incentives increasingly target industrial grade nodes and power electronics. Materials programmes prioritise advanced alloys, composites, and extreme environment polymers. Mineral strategies emphasise processing and refining capacity alongside extraction. These measures are partly driven by the expected scale and lifecycle duration of autonomous infrastructure and defence systems, where dependency on uncertain upstream inputs can undermine operational resilience.
Export controls reinforce the sameframing. Restrictions increasingly focus on dual use components such as power semiconductors, precision manufacturing equipment, advanced materials and specialised sensors.The objective is not merely to restrict access to robotic systems, but to limit the capacity to sustain and scale robotic capability over time.
Allied supply chains reflect a parallel adaptation. Complete domestic self sufficiency remains economically impractical for most states. Instead, trusted networks are being constructed around semiconductor fabrication, materials production, and mineral processing. Robotics capability therefore becomes a function of alliance architecture as much as national industrial depth. Collaborative development of autonomous systems increasingly mirrors this logic, with partners prioritising interoperability alongside trusted component ecosystems that ensure sustainment during periods of geopolitical tension.
This reframes competition. The relevant question is no longer who deploys the greatest number ofrobots in the near term, but who controls the chokepoints that determine long-term robotic viability. These chokepoints create leverage without direct confrontation. Supply prioritisation, certification requirements, or regulatory constraints can shape outcomes across multiple sectors simultaneously because substitution remains slow and capital-intensive.
Robotics therefore operates as a geopolitical system even when deployed in civilian contexts. Its supply chains encode power relationships that persist regardless of market conditions. Autonomous systems across air, land, maritime, and emerging space domains represent the earliest large-scale manifestation of this transition, demonstrating that the strategic significance of robotics derives not from autonomy alone but from the industrial and supply chain architecture that sustains it.
6. Industrial Power Is Being Reorganised Around Robotics Supply Chains
As robotics becomes the default operating platform for physical work, industrial power reorganises around the industrial ecosystems and supply chains that sustain robotic capability over time. This reorganisation is structural rather than cyclical.
Historically, industrial power was associated with labour availability, energy access, or capital accumulation. In a robotics mediated economy, these factors matter less than control over integration critical inputs. Semiconductors, advanced materials, and processed minerals become the primary determinants of industrial capacity.
This shift alters firm level hierarchies. Component suppliers that occupy critical positions in robotics stacks gain strategic importance disproportionate to their revenue size. Firms that control power electronics, precision actuators, specialised materials, or mineral processing capacity exert influence over multiple downstream sectors simultaneously. Their influence extends beyond initial deployment into maintenance, upgrade cycles, and operational continuity, allowing relatively specialised suppliers to shape system availability across sectors despite limited public visibility.
It also reshapes national industrial capability profiles. States with strong robotics integration capabilities but weak upstream control face structural dependence. States that control upstream layers can shape downstream ecosystems even without dominant integrators. Conversely, regions possessing upstream material or component advantages but lacking integration depth may struggle to translate resource strength into sustained robotic deployment capacity.
The reorganisation is visible in investment flows. Capital expenditure in semiconductor fabrication, battery materials processing, and advanced materials manufacturing has accelerated faster than spending on downstream robotics platforms. This reflects recognition that capacity constraints upstream will bind before demand saturates downstream. More broadly, this investment pattern indicates growing awareness that robotics scalability is constrained less by demand formation than by the industrial capacity required to sustain continuous physical execution.
However, the reorganisation is incomplete. Legacy industrial classifications continue to fragment analysis. Robotics, mining, materials, and semiconductors are treated as separate sectors in policy and finance, despite forming a single functional system. This fragmentation delays coordinated investment and obscures systemic risk.
The consequence is uneven capability development. Some regions possess strong robotics deployment capacity but weak supply resilience. Others control upstream inputs but lack integration depth. The balance between these positions will determine long-term industrial influence.
Industrial power in the robotics era is not defined by who builds the most machines. It is defined by who ensures that machines can be built, maintained, and upgraded without interruption.
That power accumulates slowly, locks in early, and resists displacement because rebuilding upstream capability, manufacturing depth, and lifecycle support ecosystems requires sustained coordination across industrial, financial, and policy domains.
7. Capital Is Systematically Mispricing the Robotics Control Layer
Despite clear structural shifts, capital markets continue to price robotics, semiconductors, materials, and mining as largely independent sectors. This segmentation no longer reflects how value and power are actually created.
Financial analysis still treats robotics primarily as an automation or AI adjacency story. Valuations concentrate on integrators, software platforms, and visible end products. Upstream assets are analysed through cyclical or commodity lenses that assume substitutability, price elasticity, and short investment horizons.
This is a category error.
Robotics-grade inputs are not interchangeable with generic industrial inputs. Power semiconductors for continuous duty robotics cannot be substituted with consumer-grade components without redesign and requalification. Advanced alloys qualified for aerospace or nuclear robotics cannot be replaced quickly without regulatory and performance risk. Mineral processing capacity for rare earth magnets or battery-grade materials cannot be scaled rapidly due to permitting, capital intensity, and technical complexity.
These characteristics align robotics, enabling assets to be more closely associated with infrastructure than with commodities.
Yet valuation frameworks lag this reality. Robotics-relevant mining and processing assets often trade at multiples consistent with cyclical extraction businesses despite controlling non substitutable supply. Semiconductor firms supplying deterministic, long lifecycle components are often valued below consumer-facing peers despite greater revenue stability. Materials companies supplying robotics, critical alloys, and composites are rarely analysed for system-level leverage. Suppliers whose products determine maintenance cycles, upgrade pathways, and operational continuity are frequently evaluated on near-term revenue visibility rather than their role in sustaining long-duration robotic capability.
This mispricing persists because financial models reward visible growth rather than structural control. Downstream robotics platforms show rapid revenue expansion. Upstream assets show slower, capital-intensive growth with longer payoff periods. However, when constraints bind, it is upstream control that determines who captures value.
There is also a temporal mismatch. Robotics adoption curves accelerate downstream first. Supply constraints emerge later. By the time shortages become visible, upstream assets are already strategically embedded and difficult to displace. In many cases, the window for acquiring meaningful exposure to enabling assets closes before their strategic importance is broadly recognised by markets.
The implication is not tactical. It is structural. Capital that recognises robotics as a control layer rather than a product category will allocate differently. It will favour assets that define feasibility over assets that optimise performance.
This gap between system reality and market pricing constitutes a durable investment asymmetry.
8. Conclusion: Robotics as the Mechanism of Physical Power
Robotics is becoming the mechanism through which computation, energy, and resources are converted into physical power. This is not metaphorical. It is literal.
Across aerospace, defence, healthcare, and energy, physical output increasingly depends on robotic execution. Human labour remains essential, but no longer sufficient. Once robotic systems assume primary responsibility for precision, persistence, and safety-critical work, the structure of the economy changes.
In that economy, advantage does not accrue to those who deploy robots fastest. It accrues to those who control the conditions under which robots can exist at scale.
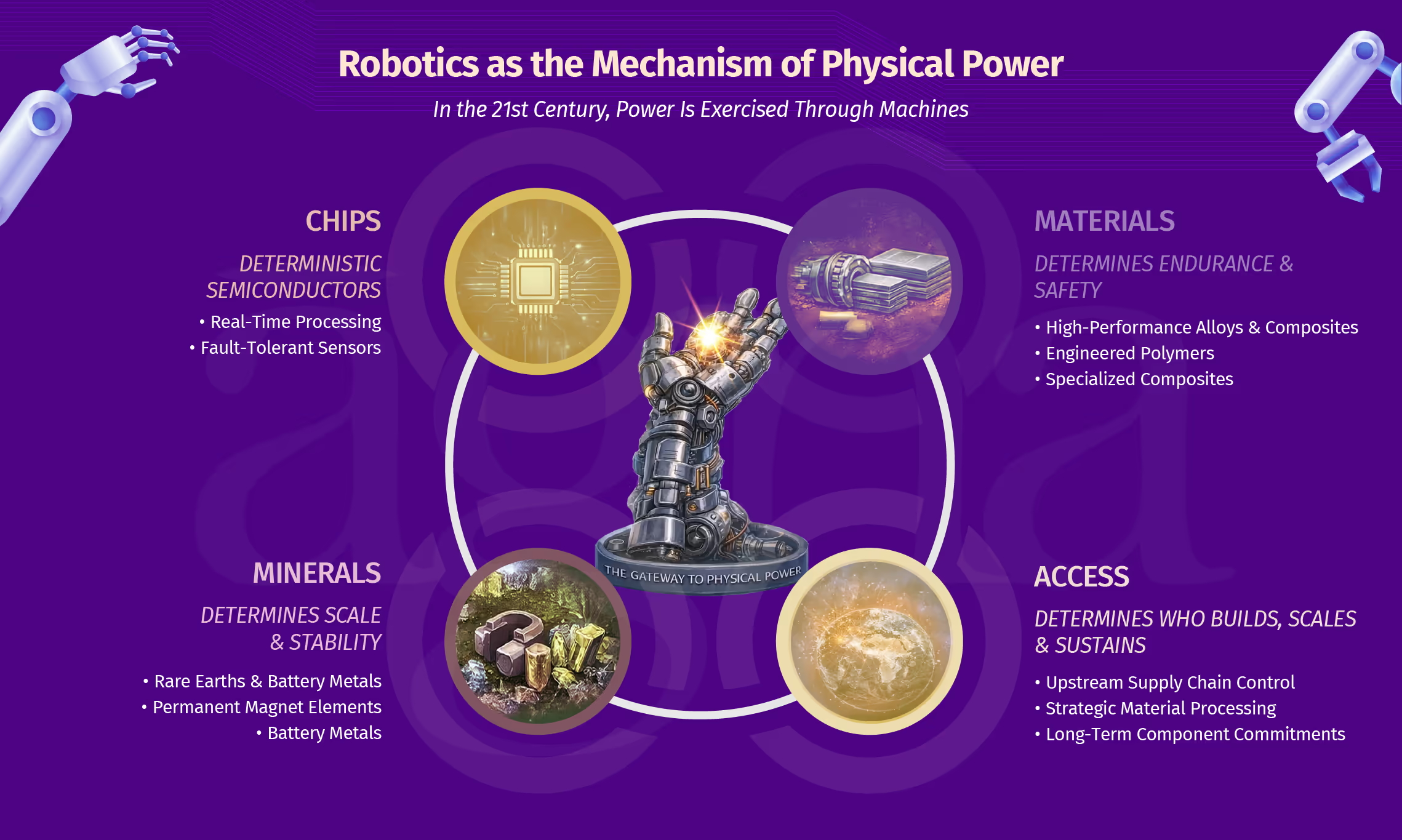
Chips determine responsiveness and reliability. Materials determine endurance and safety. Minerals determine whether production is possible at all. These inputs set hard ceilings that software and capital cannot bypass. Manufacturing depth and lifecycle sustainment capability determine whether robotic capacity can persist once deployed.
This is why robotics collapses traditional industrial boundaries. It binds semiconductors, materials science, mineral supply, and manufacturing ecosystems into a single functional system. Fragmented analysis obscures this reality. Integrated control defines it.
States are responding, albeit unevenly. Industrial policy is shifting upstream. Trade controls target enabling layers rather than finished systems. Alliances are being structured around supply chain trust rather than platform interoperability.
Capital markets are slower to adapt. Valuations still reward visibility over control. This lag will persist until constraints assert themselves more forcefully, at which point repricing will be abrupt rather than gradual.
Robotics is no longer an automation story. It is an industrial power story.
Those who understand robotics as an operating system for the physical world will focus less on what robots can do today and more on what makes robotic work possible tomorrow. Control over that layer will determine who builds, who scales, and who remains dependent.
In the twenty-first century, power is increasingly exercised through machines. Robotics is how that power is embodied.
And embodiment, as ever, is constrained by physics, not narratives.
Listen to this Museletter
Questions? Feedback? Different perspective?
We invite you to engage with us and collaborate.
Warm Regards,
Team Agna
Click below to join our mailing list for The Agna Museletter.
Agna Capital Limited is regulated by the Dubai Financial Services Authority
